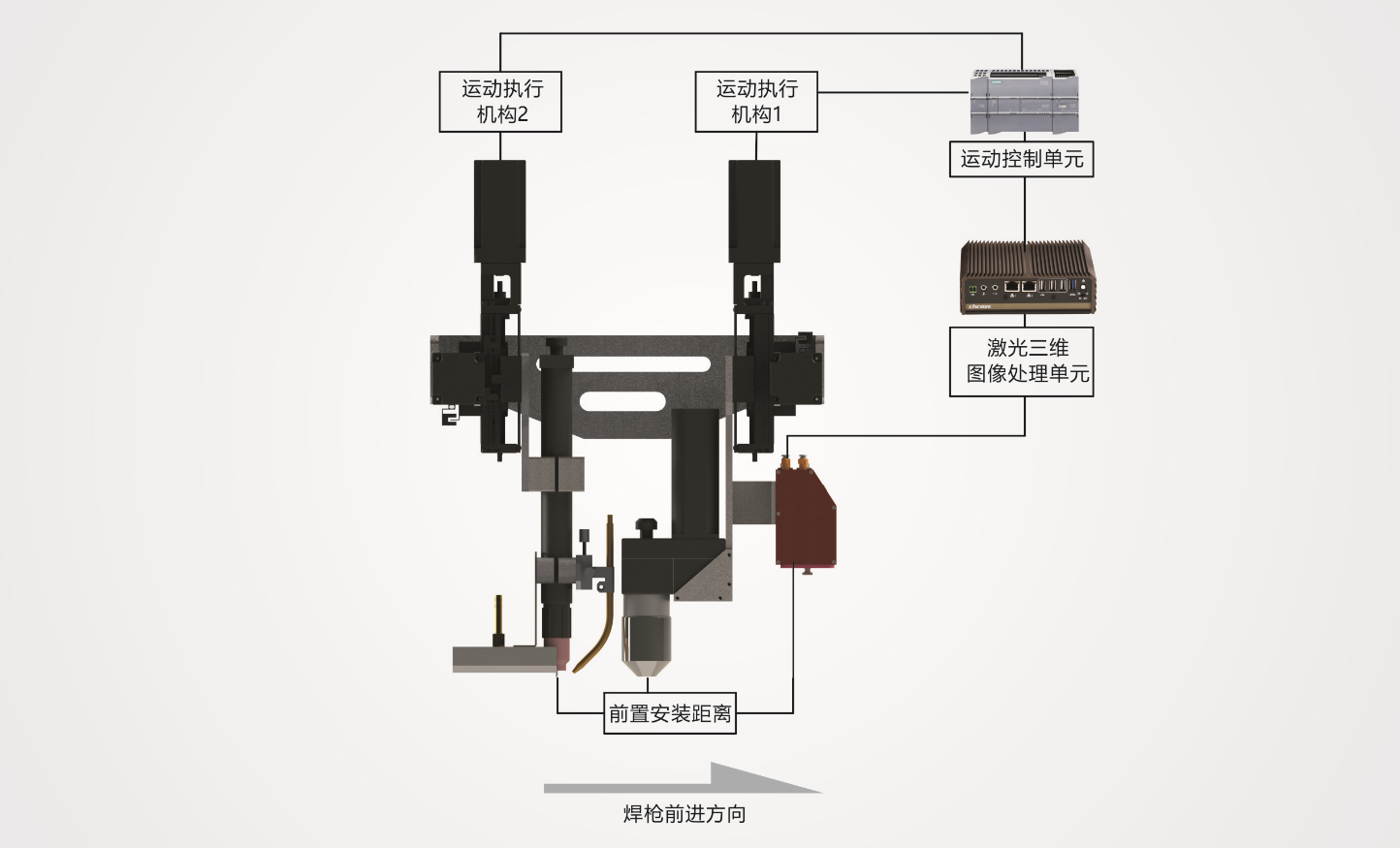
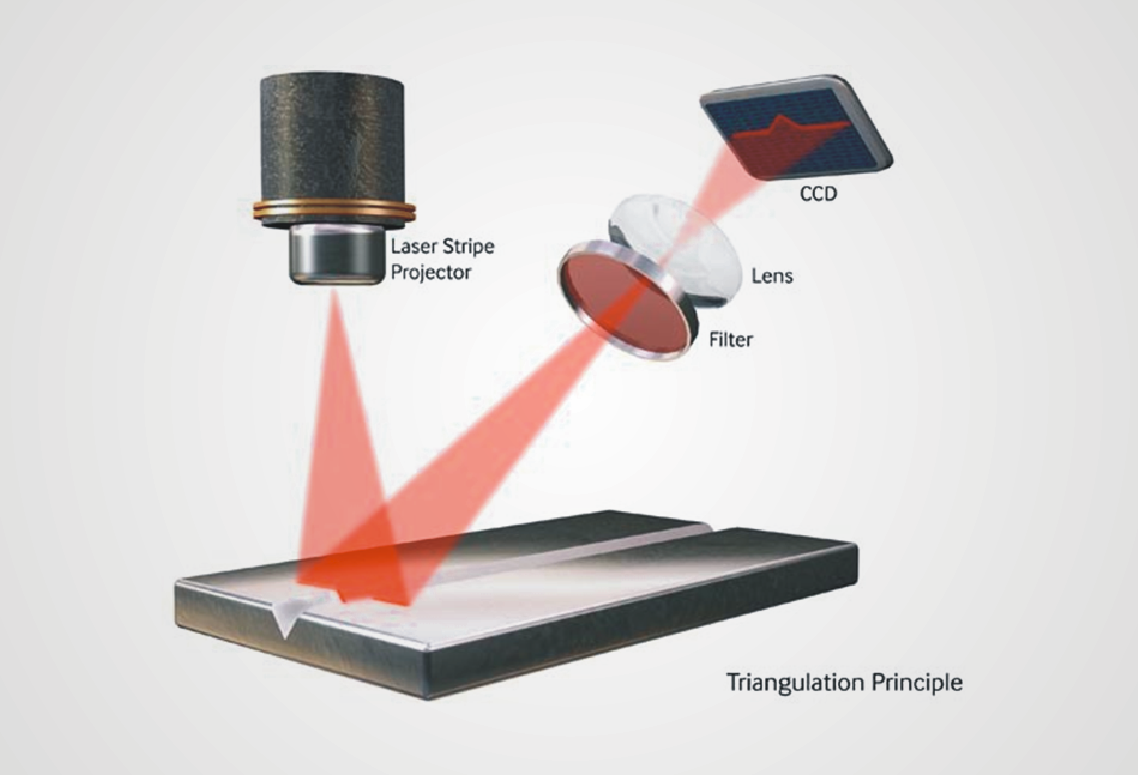
采用三角测量技术,将激光照射在目标焊缝上,通过视觉传感器采集图像,经软件处理,得到激光扫描区域内各个点的三维空间位置信息。系统通过计算检测到的焊缝与焊枪之间的偏差,结合焊枪与激光视觉传感器之间的相对位置关系,通过软件运算,将焊枪当前位置的焊缝偏差量发送给运动执行机构对焊枪位置进行运动补偿,从而实现焊接过程中对焊缝的跟踪。

适用于对接、搭接、插接、角接等多种形式的直缝、环缝、螺旋焊缝及其他不规则焊缝;
适用于TIG、MIG/MAG、SAW、PAW和LBW等多种焊接方法的单枪焊接或多枪复合焊接;
模块化设计,可同主流品牌PLC控制的焊接专机配套,便于各类品牌老设备改造
软硬件一体化滤镜处理技术,有效屏蔽弧光、飞溅等干扰,焊缝识别精准
手眼标定简单便捷,可随时更改其相对位置坐标,软件运算时自动调用
可定制专用数据通讯协议,易于同任何品牌焊接专机控制器进行集成使用
智能识别与轨迹模糊优化控制技术,保证点焊位置、焊缝异常位置,焊枪仍能平顺精准运动;
通过传感器与执行机构绑定,可适应焊缝位置变化范围较大的超视距焊缝检测及跟踪;
智能化焊缝识别、起始点识别,大大提高了自动化程度,无需人工参与,提高人工利用率及产品质量稳定性
对于复杂工况或特殊应用场合,可提供定制化服务。
技术延伸应用:管口识别、间隙测量、产品尺寸测量、产品缺陷检测、筒体圆度测量、AGV导航及精确定位、卷板机辊子位移控制系统等

